Research Field Motion Control
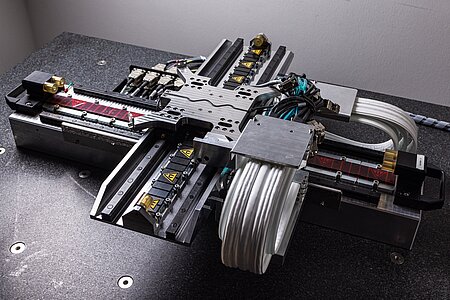
In the research focus, motion control systems are investigated toward simultaneous increase of dynamics and position accuracy (no either or). In one subarea, individual servo drives are being further enhanced. Digital control of servo drives has been successfully demonstrated with bandwidths of up to 1 kHz in the position control loop and over 10 kHz in the current control loop. At the same time, position stability in the sub-nanometer range is achieved. The control loops are executed at sampling frequencies of up to 200 kHz. In another subarea, modern techniques for the generation of multidimensional trajectories in space using hardware for parallel processing is under investigation.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy .
High-performance motion controllers
Rapid control prototyping systems or SoC-based systems with in-house developed, high-performance peripherals are used as motion controllers. For the digital control functions a model-based development process is used (Model-based development).
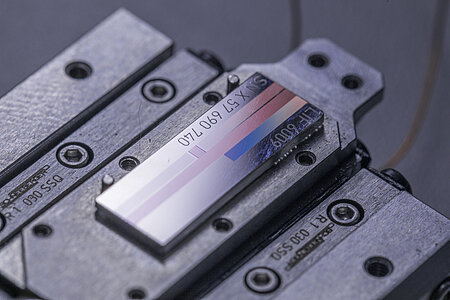
Digital ASIC
In order to miniaturize motion controllers while at the same time achieving the highest possible dynamics, this research area also includes the development of so-called application-specific integrated circuits (ASIC).
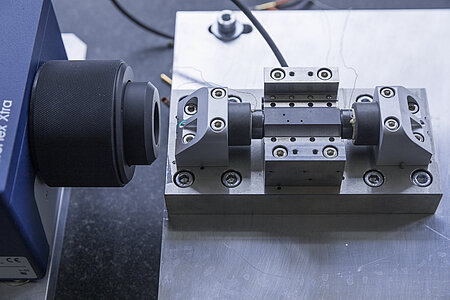
Impressions