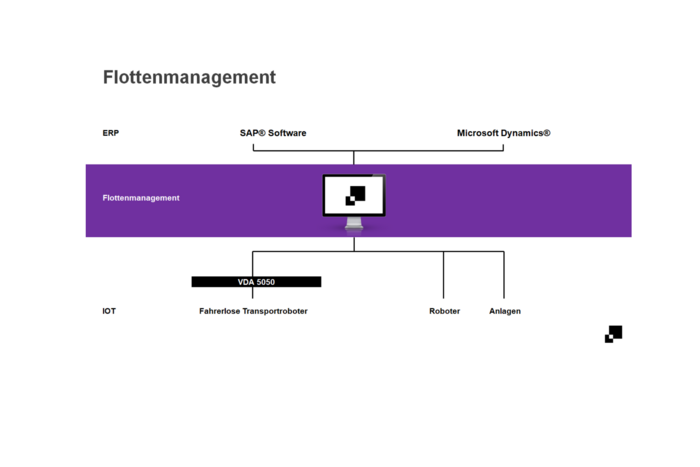
In Zusammenarbeit mit der ScaliRo GmbH (https://www.scaliro.de) startet das proto_lab die Entwicklung eines konfigurierbaren, herstellerunabhängigen Flottenmanagement-Systems für fahrerlose Transportroboter. Zielgruppen für diese Anwendung sind kleine und mittlere Unternehmen, die durch den Einsatz von FTF für Aufgaben wie Heben, Be- und Entladen sowie Transportieren von Werkstücken ihre Produktionsabläufe automatisieren und somit Kosten senken können. Ein innovativer Flottenmanager für KMU (wie er aktuell auf dem Markt noch nicht verfügbar ist) soll Mitarbeiter/innen künftig in die Lage versetzen, eigenständig selbstfahrende Transportroboter in ihre Produktion einzubinden – ganz ohne Programmiervorkenntnisse. Über einen visuellen, intuitiven Konfigurator mit vordefinierten Ablauflogiken sowie den Einsatz eines Simulationsverfahrens können Mitarbeiter/innen das Flottenmanagement-System unkompliziert und in kürzester Zeit an sich ständig ändernde Produktionsaufgaben in der Kleinserienfertigung anpassen. Der Flottenmanager soll durch die neuartige Schnittstelle VDA 5050 zudem eine herstellerunabhängige Ansteuerung von fahrerlosen Transportrobotern sicherstellen. Dadurch können KMU Angebote verschiedener FTF-Hersteller einholen und sich frei für die am besten geeignete und wirtschaftlichste Lösung entscheiden.
Die Laufzeit für dieses Projekt beträgt 2 Jahre.