Im Rahmen einer Masterarbeit wurde nun die Genauigkeit eines auf Ultrabreitband basierenden Lokalisierungssystems in der Praxis untersucht. Als Basis dienten die Ergebnisse einer vorangegangenen AFE-Master-Projektarbeit (siehe Blogbeitrag vom 14.9.2021).
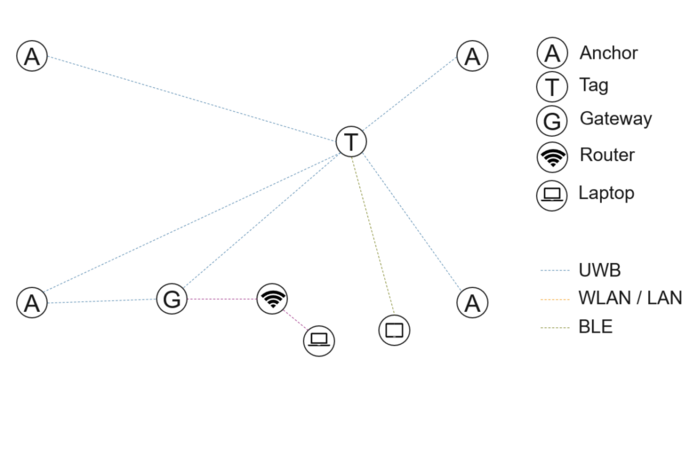
Getestet wurde ein Decawave Indoor Positioning System. Hierzu wurden in einem Teilbereich des proto_lab-Labors vier Anchors als Referenzpunkte in rechteckiger Anordnung installiert. Der zu ortende Kommissionierwagen wurde mit einem Tag versehen. Anchors und Tag kommunizieren über das Two-Way-Ranging (TWR)-Verfahren: Die Positionskoordinaten des Kommissionierwagens errechnen sich aus den Signallaufzeiten zwischen den fest definierten Ancor-Positionen und dem mobilen Tag. Die Daten werden vom Decawave-Gateway (Development-Board an Raspberry Pi) gelesen und einem verbundenen LAN/WLAN über ein MQTT-Protokoll bereit gestellt. Durch das Messaging-Prinzip „subscribe and publish“ wird jegliche Positionsänderung sofort automatisch übermittelt. Die Position des Kommissionierwagens kann über LAN-/WLAN-/Bluetooth-Verbindung oder eine Web-Applikation an jedem mobilen Endgerät (Laptop, Tablet, Smart Phone) angezeigt werden.
Die erforderliche Genauigkeit des Systems, gerade im Bereich der automatischen Teilekommissionierung durch einen Roboter konnte über eine Heat-Map grafisch bestätigt werden. Nun steht der Ausweitung des Systems auf weitere Ladungsträger sowie Räumlichkeiten des proto_lab-Labors nichts mehr im Wege.