

Über das Labor
Kompetenzen
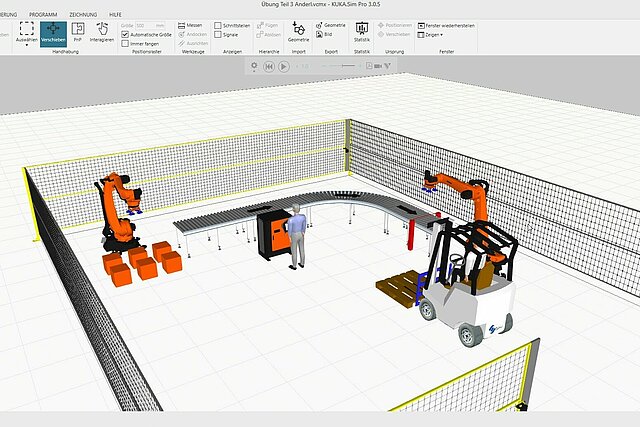
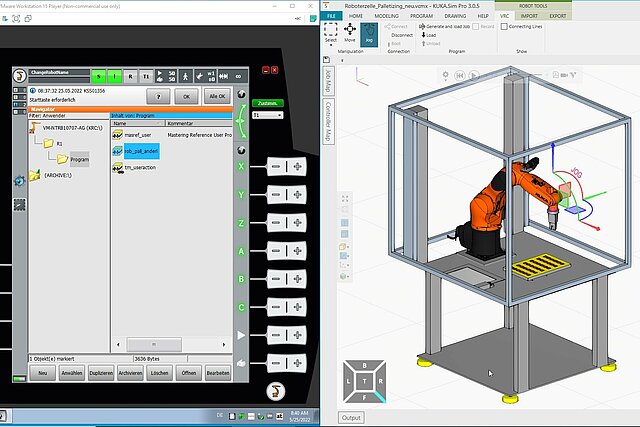
Das Labor für Montageautomatisierung und Robotik soll den Studierenden der Ingenieurwissenschaften in Bachelor- und Masterausbildung eine Einführung in die Automatisierung von Montagevorgängen bieten. Einen zweiten Schwerpunkt bildet die Arbeit mit Industrieroboter als einer wesentlichen Komponente zur Automatisierung. Dazu steht eine umfangreiche Ausrüstung verschiedener Robotertechnologien, Werkstückträger, Greifer- und Montagetechnik zur Verfügung.
Ausstattung





Projekte
Forschung & Entwicklung
Das Labor Montageautomatisierung und Robotik ist beteiligt am Forschungsschwerpunkt „Mechatronische Systeme“ der TH Rosenheim, insbesondere im Forschungsgebiet "Kollaborative Montage" und "Kinematik für Montageprozesse".
Studentische Projekte
Im Rahmen von Studienarbeiten werden Anwendungen der Montageautomatisierung entwickelt und umgesetzt. Die vorhandene Laborausstattung kann auch zur Durchführung von Machbarkeitsstudien genutzt werden. Durch Zusammenarbeit mit anderen Laboren der Hochschule können umfangreichere Themen bearbeitet werden.
Studentische Projekte/Abschlussarbeiten sind unter diesem PDF einsehbar
Partner
Industrieunterstützung
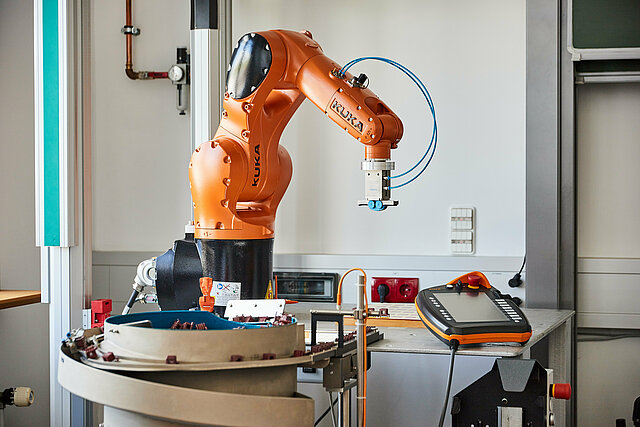
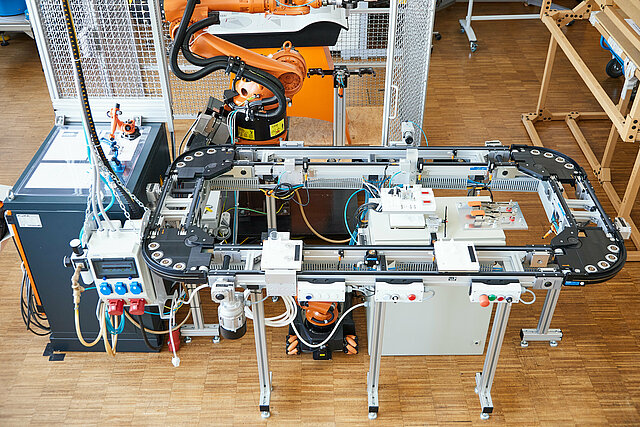
An Versuchseinrichtungen, die überwiegend aktuelle Serienprodukte namhafter Hersteller nutzen, erfolgt die praktische Ausbildung. Dadurch wird die evtl. „graue“ Theorie vertieft oder erst nachhaltig begriffen. Ermöglicht wurde die praxisnahe Ausrüstung des Labors durch die großzügige Unterstützung vieler marktführender Unternehmen (Unterstützende Unternehmen und Organisationen). Den Firmen sei hierfür sehr herzlich gedankt.
Kontakt
Raum: R 2.06 (Lageplan)
Telefon Labor: +49 (0)8031 805-2682
Laborleiter: Prof. Dr.-Ing. Christian Meierlohr
Mitarbeiter: Dipl.-Ing. (FH) Andreas König