

Über das Labor
Kompetenzen
Im Labor für elektrische Antriebstechnik erfolgt in Bachelor- und Masterstudiengängen die praktische Ausbildung zu folgenden Themen:
- Motion Control Systeme
- Modellbasierte Entwicklung von Servoantriebssystemen auf Basis MATLAB®, Simulink®, Ansys® und dSPACE®
- Positionsmesstechnik
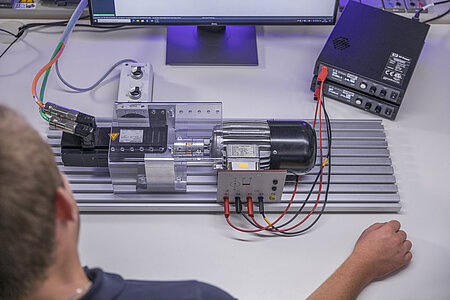
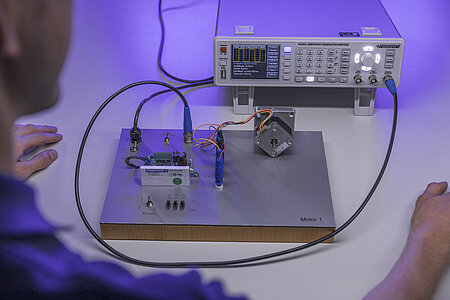
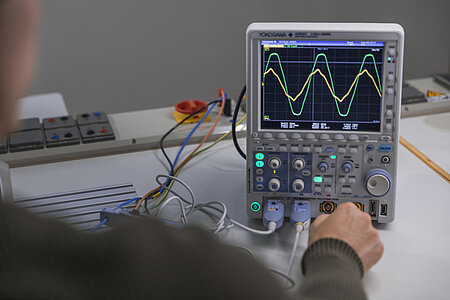
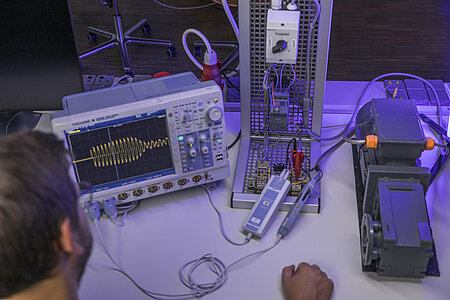
Es werden Kenntnisse von den Motorgrundlagen, über alle Antriebskomponenten bis hin zur Auslegung komplexer Servoantriebssysteme vermittelt. An praxisnahen Versuchsständen mit aktuellen Industriekomponenten werden die Lehrinhalte vertieft. Dabei wird an industriell üblichen Spannungsniveaus (400V Drehspannung) gearbeitet.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Privacy .
Ausstattung
Versuchseinrichtungen für die Ausbildung












Laborausstattung
Projekte
Forschung & Entwicklung
Das Labor Elektrische Antriebstechnik ist beteiligt am Forschungsschwerpunkt „Mechatronische Systeme“ der TH Rosenheim, insbesondere im Forschungsgebiet „Motion Control“, „Strukturmechanik“ und“ Modellbasierte Entwicklung“.
Partner
Industrieunterstützung
An Versuchseinrichtungen, die überwiegend aktuelle Serienprodukte namhafter Hersteller nutzen, erfolgt die praktische Ausbildung. Dadurch wird die evtl. „graue“ Theorie vertieft oder erst nachhaltig begriffen. Ermöglicht wurde die praxisnahe Ausrüstung des Labors durch die großzügige Unterstützung vieler marktführender Unternehmen (Unterstützende Unternehmen und Organisationen). Den Firmen sei hierfür sehr herzlich gedankt.
Kontakt
Raum: R 1.12 (Lageplan)
Telefon Labor: +49 (0)8031 805-2750
Laborleiter: Prof. Dr.-Ing. Franz Stubenrauch
Laborpartner: Prof. Dr.-Ing. Rainer Hagl
Mitarbeiter*innen